El Doberman fue criado originalmente para la protección y acompañamiento
Historia
El Doberman fue criado originalmente para la protección y acompañamiento durante Herr Doberman rondas como recaudador de impuestos. A través de la historia, el Doberman se ha utilizado para muchas tareas, incluyendo la entrega de mensajes durante la guerra, patrullando los objetivos militares, policiales trabajo, búsqueda y rescate, perros guía para personas con discapacidad, y en los deportes de anillo que incluye la conformación, obediencia, agilidad, seguimiento y schutzhund. Estas diversas tareas requieren que el Doberman utilizar muchos aires, dependiendo de la tarea en cuestión.
Algunas razas tienen aires naturales que son específicos para ellos. Los ejemplos incluyen el andar del caballo de alquiler Minpin, el trote de vuelo del pastor alemán, o el sobrepaso del Viejo Pastor Inglés. Estos aires son características de la raza.
El Doberman se ha dicho para ser una raza al galope, y es más cómodo en ese andar. Sin embargo, la observación de muchos Dobermans en un entorno natural, se encuentra que la raza se siente cómodo en los aires varios, entre ellos el paso, trote, galope, galope y doble suspensión. La raza utiliza cualquier y todos estos aires dependiendo de la necesidad.
A efectos prácticos, el Doberman se evalúa al trote en el ring (como lo son la mayoría de las otras razas). Por esta razón, esta discusión será limitada a ese paso.
Visión de conjunto
Los perros de trabajo más eficientes son aquellos que pueden trabajar más largo en sus funciones designados con la menor cantidad de esfuerzo. El perro eficientemente móvil viaja en línea recta con la cantidad mínima de energía. Se requiere que haya ningún rebote, laminados, o guiñada (giro en el eje vertical).
Longitud de zancada del perro es una consideración importante. Para un perro dado, los menos pasos necesarios para cubrir una distancia dada, menos energía se requiere.
En la mayoría de los perros, la parte trasera proporciona la principal fuerza propulsora para moverse. La parte posterior y el lomo de proporcionar la rigidez para transmitir la fuerza desde la parte posterior a la frontal. El frente lleva aproximadamente 60% del peso y proporciona alguna propulsión adicional.
La Norma Doberman describe el modo de andar como «Libre, equilibrado y vigoroso, con buen alcance en los miembros anteriores y buena conducción en los cuartos traseros. Al trote, hay un fuerte impulso acción posterior. Cada pata trasera se mueve en línea con la pata delantera en el mismo lado. Patas traseras y frontales son arrojados afuera ni hacia adentro. La espalda permanece fuerte y firme. Cuando se mueve en el trote rápido, un perro bien construido que solo la pista. «
La evaluación de la marcha lateral
Muestra a continuación es una vista lateral del Doberman al trote. El gráfico fue tomado de The Illustrated Doberman Pinscher 1 1987 un folleto preparado por el Club de Doberman Pinscher de América (DPCA).
Vamos a comenzar la discusión con la primera línea de la descripción movimiento «Free, equilibrado y vigoroso, con buen alcance en los miembros anteriores y buena conducción en los cuartos traseros.» Nota del alcance frontal y la parte posterior extensión en la Figura 1
Utilizando el mismo gráfico se puede dibujar un triángulo sobre el perro como se ve en la figura 2 para visualizar la posición apropiada de las piernas.
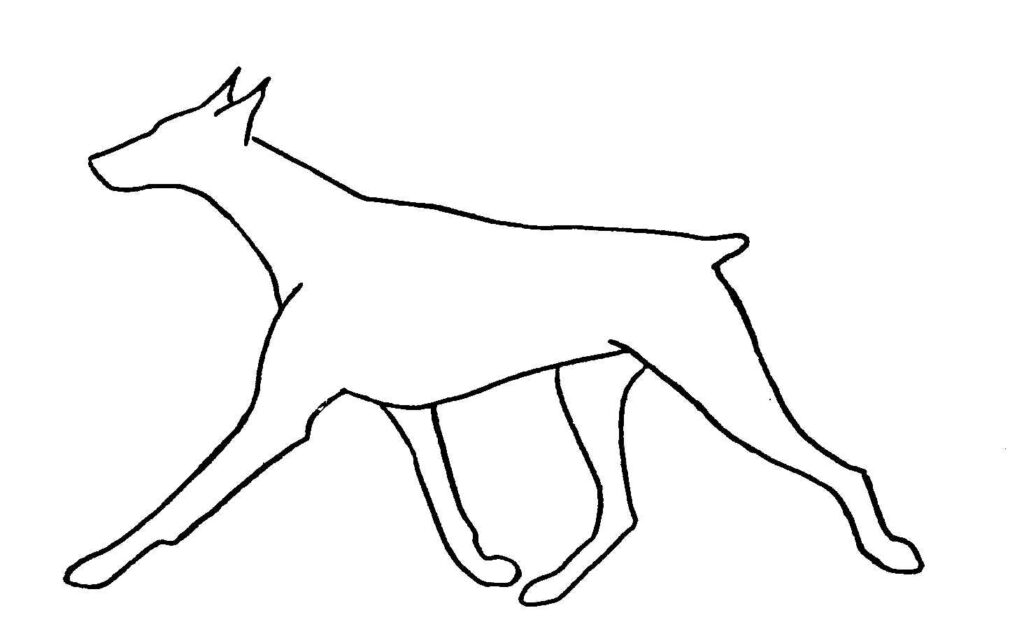
El alcance frente del perro debe resultar en una extensión frontal aproximadamente por debajo de la nariz. La extensión posterior debe equilibrar la parte delantera con un contragolpe iguales. Como se puede ver, el ápice del triángulo está justo por encima del punto en el que el pie delantero y trasero posiciones de cambio del pie (sobre el centro de la línea superior del perro). El ángulo que forma el alcance frontal es aproximadamente igual al ángulo que forma la prolongación posterior. Este es el movimiento equilibrado e ilustra la marcha correcta lado Doberman.
Cuando la evaluación de la marcha, es importante considerar la elevación de los pies. Si un perro levanta las patas delanteras o traseras excesivamente por encima del suelo, se está desperdiciando energía. Cuanto más cerca de los pies permanecen en el suelo, menos energía se requiere. No es un término viejo perro llamado «corte margarita» que describe a un perro en movimiento como una forma eficiente cuyos pies se elevan lo suficiente para cubrir el suelo áspero, sólo cortar la parte superior de las margaritas que se mueve.
Para estudiar el modo de andar lado, siga los pasos como el perro se mueve.
En el trote, el perro está continuamente moviéndose sobre las piernas. El pie delantero toque el suelo ligeramente por detrás de la nariz y de inmediato se mueve hacia atrás. Mientras que se mueve pasa por debajo del conjunto frontal hasta el punto en que se levanta del suelo para mover de nuevo hacia delante. La pierna en la parte trasera en el lado opuesto está simultáneamente siguiendo el camino inverso. Se dejando su posición extendida y moverse hacia adelante por el conjunto trasero, y se extiende hasta aproximadamente el punto medio del cuerpo del perro.
Justo debajo del centro de la línea superior, el pie delantero se eleva para avanzar para el siguiente paso. Los pasos del pie trasero en casi la misma pista que los desocupe pie delantero. Hay un movimiento hacia adelante muy ligeramente del cuerpo del perro entero cuando ambas patas delanteras y traseras se levantan del suelo al mismo tiempo. Esto permite que el pie trasero para asumir la misma posición que el pie delantero desocupar. (En caso contrario el pie trasero podría interferir con el pie delantero.) Este movimiento de avance leve es lo que Rachel Elliot Página 2 describe como la «primavera» en el modo de andar. Contribuye a la mirada de «libre y equilibrado» el movimiento como se describe en la norma. Algunos lo caracterizan como deslizarse o flotar. Esta vez ligera «en vuelo» no es visible a simple vista, pero se ha demostrado en estudios científicos de Elliot y 2 se puede ver en la suavidad de la marcha.
Desde la parte trasera proporciona la mayor parte del movimiento de propulsión, es importante tener en cuenta su acción. El movimiento de la pierna trasero puede ser considerado como una acción de 3-fases. En la primera fase de la pierna debajo del perro llega a tocar el suelo casi al mismo punto que el pie delantero está vacante. El muslo y músculos de la cadera están haciendo la mayoría del trabajo. En la segunda fase, la pierna se balancea hacia atrás debajo del conjunto de la cadera del perro y la utiliza principalmente el ensamblaje de la pata superior de su poder. En la tercera fase, la pata trasera continúa hacia atrás desde debajo del conjunto de la cadera. Una combinación de la pierna superior y la extensión de la parte trasera cuartilla proporcionar la fuerza de propulsión. Cerca del final de esta fase, el Metatarso retroceso para proporcionar la mayor parte de la propulsión final.
El final de la última fase nos dice por qué la parte trasera cuartilla (una parte aparentemente pequeña de la pierna) es tan importante en el movimiento general del perro. Al comparar la anatomía de un perro a un ser humano es poco exacta, pero muslo superior e inferior del ser humano es análogo al muslo superior e inferior del perro. El tobillo es análogo al corvejón del perro, y el pie humano se utiliza de manera similar a cuartilla trasera del perro. Hacia el final de la etapa, el humano empuja con el pie. Lo mismo es cierto para el perro con la parte trasera metacarpo. Usted puede imaginar lo que pasaría si sus pies estaban confinados por la cinta de manera que no se podía flexionar el pie. No se podía proporcionar ese empujón final para su propulsión hacia adelante. Lo mismo es cierto del perro. Esto ilustra la importancia de la parte trasera de alimentación cuartilla a un trote … humano o canino.
La norma establece que «La espalda permanece firme y fuerte». Esto simplemente requiere que el perro está de vuelta razonablemente rígida y fuerte, y no rebotar debido a la flojedad, la longitud, ni de las proporciones incorrectas o angulación.
La línea superior del Doberman debe permanecer plano y recto.
Un Doberman que rebota sobre la cruz tiene una seria desventaja. Vamos a tratar de cuantificar los efectos de un frente de rebote debido a una combinación de desviaciones estructurales.
Si un macho Doberman tiene una zancada de 28 pulgadas en el trote (2263 pasos por milla), y la cruz moverse hacia arriba y hacia abajo 1/2 pulgada a cada paso, y luego del frente del perro gastará la energía equivalente a levantarla 94 pies, mientras que itinerante que milla. Desde delante del perro es aproximadamente 60% del peso total del perro, el perro habría gastado 60% de la energía para elevar todo su cuerpo los 94 pies. En otras palabras, después de trotar una milla, el perro también se han gastado la energía equivalente a subir un edificio de 6 plantas (60% de los 94 pies). El trabajo extra gastado en una hora de trote (por lo general a 5 millas por hora) sería el equivalente de subir 30 pisos. Después de un día de trabajo, este perro será mucho más cansado que uno que se mueve sin rebote sobre la cruz.
Pasando con paso lateral, el carro de la cabeza debe extenderse algo por encima de la horizontal, como se muestra en la figura 1. Se trata de un carro de la cabeza natural para el Doberman en el trote. El Doberman no debe moverse con la cabeza extendida hacia delante como si fuera un animal de tiro o con la cabeza hacia arriba y atrás, como es típico en un caniche.
Si un macho Doberman tiene una zancada de 28 pulgadas en el trote (2263 pasos por milla), y la cruz moverse hacia arriba y hacia abajo 1/2 pulgada a cada paso, y luego del frente del perro gastará la energía equivalente a levantarla 94 pies, mientras que itinerante que milla. Desde delante del perro es aproximadamente 60% del peso total del perro, el perro habría gastado 60% de la energía para elevar todo su cuerpo los 94 pies. En otras palabras, después de trotar una milla, el perro también se han gastado la energía equivalente a subir un edificio de 6 plantas (60% de los 94 pies). El trabajo extra gastado en una hora de trote (por lo general a 5 millas por hora) sería el equivalente de subir 30 pisos. Después de un día de trabajo, este perro será mucho más cansado que uno que se mueve sin rebote sobre la cruz.
Pasando con paso lateral, el carro de la cabeza debe extenderse algo por encima de la horizontal, como se muestra en la figura 1. Se trata de un carro de la cabeza natural para el Doberman en el trote. El Doberman no debe moverse con la cabeza extendida hacia delante como si fuera un animal de tiro o con la cabeza hacia arriba y atrás, como es típico en un caniche.
La evaluación de la marcha hacia abajo y atrás
La marcha hacia abajo y de nuevo se describe en la norma como «cada uno se mueve las patas traseras en línea con la pata delantera en el mismo lado. Patas traseras y frontales son arrojados afuera ni hacia adentro. … Cuando se mueve en el trote rápido, un perro bien construido que solo la pista. «
La Figura 3 muestra el correcto movimiento hacia abajo y atrás para un Doberman. Figura 4 tiene líneas añadidas a enfatizar que la pata forma una columna de línea recta y se mueve en el mismo plano que la pierna opuesta en el mismo lado y convergen hacia una línea central debajo del perro.
Las patas deben ser rectas a lo largo de su recorrido, no sólo al principio y al final de la etapa. La norma exige que las piernas «no ser arrojado dentro o fuera.» Esto excluye ciertas desviaciones de la estructura que se describen en la siguiente sección.
Observe en las figuras 3 y 4 que las patas traseras no se pueden ver cuando el perro se acerca, ya que las patas delanteras se mueven en línea con la parte trasera y que forman parte. De manera similar, cuando se ve desde la parte trasera, las patas traseras cubrir las patas delanteras.
La importancia de avanzar con las piernas rectas puede apreciar si comparamos las patas del perro con las piernas humanas. Es verdaderamente un raro atleta de resistencia humana que no tiene piernas muy rectas. Knock-rodillas o piernas arqueadas no permitir que las fuerzas de viajar directamente a través de las articulaciones. Más bien, causar una fuerza lateral en las articulaciones, que puede dañar las juntas durante un período de tiempo, y hacer que el atleta para mover ineficiente. El mismo razonamiento se aplica a los perros que no mantienen las piernas rectas durante todo el viaje.
La norma exige que el perro sola pista al trote rápido. El propósito de la única pista es para el equilibrio y la conservación de la energía. Considere la posibilidad de un perro que no tiene una sola pista al trote. Tal perro tendría una tendencia a tener un balanceo de la carrocería. Esto puede ser ilustrado por la Figura 5 a continuación:
Las patas están en las esquinas del perro. Si el perro se mueve sin converger, habrá una tendencia a tener un balanceo de la carrocería. Esto se produce porque sólo una pierna de un par (delantero o trasero) está en el suelo al mismo tiempo. Cuando un pie trasero está en el suelo, el pie trasero otra se está moviendo para la siguiente etapa. Lo mismo es cierto de la pareja frontal. Cuando sólo la pierna izquierda está apoyando el perro, habrá una tendencia a que parte posterior del perro a rodar hacia la derecha. Cuando sólo la pierna derecha se apoya el perro, habrá una tendencia a rodar hacia la izquierda. Patas delanteras y traseras del perro mover opuesto uno del otro. Esto causaría un laminado de una sola dirección en la parte delantera y una laminación en la otra dirección en la parte trasera. Este modo de andar rodando se ilustra bien en perros amplio conjunto, tales como el Bulldog.
Aunque algunos Dobermans no convergen adecuadamente, no tienen un balanceo exagerado o torsión del cuerpo que se ve en los perros de ajuste de ancho. Sin embargo, la tendencia sigue ahí para que el perro se mueva de manera similar al Bulldog. No es una marcha eficiente para un perro de trabajo. Al juzgar el Doberman, la convergencia es un punto importante.
El perro también debe moverse en una línea recta con un cuerpo recto a ser un motor eficiente. Algunas fallas estructurales provocará un perro se mueva con una guiñada o en un «secundarios» o devanado de marcha «cangrejos». Esta toma de distancia de nuestro deseo de que el perro se mueven en línea recta, con rebote mínimo, rodar, o guiñada. Aunque el perro parecerá que se mueve en una línea recta, que no se mueva con su cuerpo (columna vertebral) en línea con la dirección del movimiento.
¿Cómo afecta a la estructura de movimiento?
En un show, el juez hace una evaluación estática de considerar cabeza, color, pelaje, condición, temperamento, estructura, etc. Las consideraciones estructurales en esta evaluación a menudo se puede predecir cómo un perro se mueve, pero hay razones por las conclusiones de la evaluación estructural estático no coinciden con cómo el perro realmente se mueve.
La estructura y la musculatura del perro controlar el movimiento del perro. Si el perro está en buen estado físico (peso, tono muscular y la fuerza de los tendones y ligamentos), entonces su musculatura no es una consideración. El perro se moverá entonces, así como la estructura permitan.
Sin embargo, la falta de musculatura apropiada y acondicionamiento puede hacer un movimiento perro de otra manera correctamente estructurado mal. Esto es particularmente notable en el movimiento delantero. Los hombros no están conectados al resto de la estructura a través de las articulaciones, sino que están conectados a través de los tejidos blandos (músculos, tendones, etc.) Es perfectamente posible que un perro se mueva incorrectamente por falta de aire y no a través de la estructura de culpa.
La mayoría de los jueces de acuerdo en que la observación del movimiento del perro es en última instancia, la mejor manera de determinar si la evaluación estática es correcta.
Para mover correctamente el perro debe estar estructurado correctamente. La correcta estructura Doberman tomado de The Illustrated Doberman Pinscher 1 se ilustra en la Figura 6 a continuación:
Esta estructura presenta las proporciones y ángulos que definen una correcta Pinscher Doberman. Las desviaciones de esta estructura hará que las desviaciones del movimiento ideal.
A continuación se destacan algunas como las desviaciones estructurales afectan el movimiento del Doberman.
El problema estructural primero es el requisito muy importante que el Doberman ser cuadrado. Dos variaciones pueden ocurrir. El perro es demasiado largo en el cuerpo, o el perro es demasiado corta en el cuerpo.
A diferencia de razas, cuyos cuerpos son más largo que alto, un perro cuadrado realmente debe ser construido con las proporciones correctas y ángulos, si es que se mueva correctamente. Simplemente no hay más espacio para dar cabida a cualquier interferencia entre la parte delantera y patas traseras de un perro cuadrado.
Considere un perro cuadrado con una relación posterior sobre-angulado hacia el frente. La angulación trasera exceso provoca una sobre-alcance en la parte trasera para que sus patas traseras interferir con las patas delanteras. Un perro cuadrado debe encontrar una manera de compensar el desequilibrio de modo que sus piernas no interfieran debajo de su cuerpo. Se puede compensar moviendo con sus patas traseras a un lado de las patas delanteras, o se puede mover de ancho en la parte trasera por lo que sus patas traseras no golpee las patas delanteras.
Un perro de cuerpo largo ofrece más espacio debajo de su cuerpo, por lo que sus pies no va a interferir. El espacio extra perdona fallos que sería fácilmente evidente en un perro cuadrado. El perro ya no balanceada con cuerpo puede aparecer en movimiento, pero tiene dos defectos, el desequilibrio de delante a atrás y por mucho tiempo en el cuerpo.
Un Doberman con una longitud de pierna más larga que la altura del cuerpo tendrá el mismo problema con la interferencia en el cuerpo. No habrá suficiente espacio debajo del perro para colocar sus pies sin interferencia, porque las piernas largas «traspasar» lo que su longitud corporal puede acomodar. Sus patas traseras golpear las patas delanteras antes de que el pie delantero puede salir del camino. Su compensación es similar al perro que se overangulated en relación trasera a la frontal.
El movimiento típico de estos dos desviaciones en la estructura es un perro que «los vientos de costado» o «cangrejos» cuando se mueve. Se mueve con su parte trasera a un lado de la frente, de modo que sus pies traseros golpee contra el suelo a un lado de sus patas delanteras. Esto le da la apariencia de moverse hacia los lados o en movimiento como un cangrejo.
Otro medio para compensar esta desviación estructural es el perro que se mueve más ancho en la parte trasera que en la delantera. Esto ocurre en los Dobermans de vez en cuando, pero la raza es mucho más probable que viento lateral que mover ancho en la parte trasera.
Continuando con el tema de delanteros desviaciones estructurales, considere la angulación del hombro. Las llamadas estándar para el hombro para estar en 45 grados de la vertical. Hay un viejo adagio que dice que un perro «no puede llegar más allá de sus hombros». Esto significa que cuando el perro se extiende la pierna para el paso hacia adelante, el ángulo de la pierna se controla mediante el ángulo del hombro.
Un perro con un hombro más pronunciada que en la Figura 6, por ejemplo 35 grados de la vertical en vez de 45 grados, no puede llegar lo más adelante. Uno de los resultados es un perro que necesita pasos más cortos, tanto delanteros y traseros. Piense en una persona cuya normal zancada se acorta en un 10%. Esa persona de repente tiene que tomar el 10% más pasos para cubrir la misma distancia … un paso incómodo. Lo mismo se aplica para el perro. Para un perro dado, el más largo es el paso natural, más eficiente es el modo de andar.
Aunque el movimiento adelante y atrás a la misma velocidad con el mismo número de pasos, es posible que las longitudes de paso no son iguales. Esto puede suceder si el perro no es equilibrada, con más angulación posterior de angulación delantera (una ocurrencia común en los Dobermans).
En este caso su paso delantero es más corto que su paso posterior. Para compensar, se debe levantar la frente alta de lo normal para mantenerlo en el aire más tiempo, mientras que su parte posterior tiene pasos más largos. La parte frontal está tomando pasos cortos, pero está en el aire durante un tiempo corto. Esta estructura hace que delante del perro para que suba y baje y es un paso muy ineficiente como se cuantificó antes.
La correcta frente Doberman como se ve desde la parte frontal se muestra en la Figura 7.
En la parte delantera correcta, las patas están en una línea recta desde el hombro a través del codo, metacarpos y pies. Ellos son paralelos entre sí y son, bajo el hombro del perro.
Las desviaciones típicas de frente se muestra en la figura 8 e incluyen, codo hacia fuera, frente pellizcado, toeing fuera, y en varo-.
No vamos a hablar de cada una de estas fallas de forma individual, ya que todos ellos comparten un rasgo común. Evidentemente, ninguna de estas estructuras delanteras permitirá que el perro se mueva con las piernas en una columna recta simplemente porque las piernas no están estructurados de una manera columnar en la posición de pie. Las fuerzas de movimiento se transmiten a través de las articulaciones, pero debido a que las patas no son rectas, las articulaciones se flexionan lateralmente y absorber parte de la energía. Esto subraya las articulaciones y los neumáticos de los perros.
Además, la desviación pellizcada frontal hará que el perro a tirar de las patas delanteras de un lado-a-lado, el desperdicio de energía aún más. El perro que los codos hacia fuera típicamente tirar las patas delanteras hacia afuera mientras se mueve … otro paso ineficiente.
Antes de salir de la parte frontal, es importante considerar los pies y metacarpos. El estándar de las describe como «empresa Metacarpos y casi perpendiculares al suelo. Espolones pueden ser eliminados. Pies bien arqueados, compactos y felina, sin girarse hacia adentro ni hacia fuera. «
Figura 9

Figura 10
La Figura 9 ilustra la correcta metacarpo y el pie. La ligera inclinación en la cuartilla proporciona un resorte en la parte frontal para absorber el choque, mientras que los pies apretados proporcionar una base firme para soportar el perro.
La figura 10 muestra una débil cuartilla y un pie que no es «como un gato». Los débiles flexiona pastern excesivamente cada vez que el pie golpea el suelo, absorbiendo la energía que se debe utilizar para propulsar el perro. Del mismo modo, el pie débil absorbe demasiada energía y es una zona propensa a las lesiones. Ambos pueden conducir a un movimiento ineficiente y lesión temprana.
Después de haber completado las desviaciones estructurales delanteros, ahora consideran la parte trasera. Movimiento posterior es más fácil juzgar que el movimiento del frente, porque las patas están unidas al resto de la estructura a través de las articulaciones, no solo a través de los tejidos blandos. Movimiento posterior está más influenciada por la estructura y no como fuertemente influenciado por el condicionamiento. También el movimiento de la parte posterior es menos complejo que el de la parte frontal, debido a que el hombro se mueve hacia arriba y hacia abajo y gira a través de su movimiento normal. La parte trasera no tiene esta complejidad.
La norma describe la parte trasera de la siguiente manera:
«La angulación de los cuartos traseros equilibra la de los cuartos delanteros. Hip-Bone se aleja de la columna vertebral en un ángulo de aproximadamente 30 grados, produciendo una grupa ligeramente redondeada, bien lleno fuera. Shanks-superior en ángulo recto a los huesos de la cadera, son largo, ancho y bien musculada a ambos lados del muslo, con sofoca claramente definida. Mangos superior e inferior son de igual longitud. Mientras que el perro está en reposo, corvejón al talón es perpendicular al suelo. «
Figura 11
La norma describe la estructura trasera bien cuando se ve con la ilustración en la figura 11. Lo único que necesita es claridad el corvejón (trasera cuartilla) de longitud, ya que es tan vital para el correcto movimiento del perro.
La norma establece ilustra la longitud correcta del corvejón, aunque la norma no lo describe con palabras.
Dado que el Doberman se describe en la norma bajo Características generales como «compacto en su construcción, musculoso y potente, para una gran resistencia y velocidad.» Uno esperaría ver un corvejón es de longitud moderada para lograr el equilibrio deseado de resistencia y velocidad. A largo Metatarso se asocia normalmente con el tipo de animales de sprint como los conejos o antílopes … bueno para las explosiones cortas de alta velocidad, pero no la resistencia. A corto Metatarso se asocia normalmente a un animal de tiro … lento pero potente y duradero, pero no es capaz de gran velocidad. Dado que el Doberman es ninguna de las dos tenemos que llegar a un equilibrio, por lo que un largo moderado de vino del Rin a pie se desea.
Una buena manera de entender la estructura trasera correcto es estudiar las desviaciones típicas. Algunas desviaciones se muestra en la Figura 12, y representan, de izquierda a derecha una overangulated trasera, una parte trasera recta con una grupa plana, y una parte trasera overangulated con corvejones falciformes y un croup empinada.
Figura 12
La parte trasera overangulated rara vez coincide con un frente overangulated. Por lo tanto, la mayoría de los perros con este fallo también se desequilibra. La angulación excesiva hace que la parte trasera de llegar a la parte delantera como se ha explicado anteriormente. El perro típicamente compensa moviendo ancho en la parte trasera o en movimiento la parte trasera a un lado de la parte frontal (cangrejos).
El medio gráfico es recta en la parte trasera con una grupa plana. El resultado esperado es un movimiento posterior restringido. El perro no puede llegar lo suficientemente bajo. Su recta sofocar grupa plana y no permitirá que la parte trasera para extender (similar a un frente recto, no permitiendo que alcance correcto). La articulación del corvejón recto no proporciona suficiente energía para seguir a través de la parte trasera cuartilla «push-off»
La parte trasera overangulated y corvejones falciformes es particularmente preocupante. Los mismos problemas se presentan como el perro overangulated anteriormente, pero con los corvejones hoz de la cuartilla trasera no se puede enderezar. Un perro con estos fallos normalmente se moverá con su parte trasera debajo de él, nunca se extiende con el poder. La grupa fuerte también limitará la extensión posterior.
Una combinación de fallos que se ven de vez en cuando en los Dobermans es un overangulated trasera con una grupa plana. Este perro se parecen moverse correctamente porque la grupa plana compensa la parte trasera overangulated y le permite llegar de vuelta. Parece que es correcto, cuando en realidad hay dos desviaciones en el perro, más que ninguno.
El estándar también que «Visto desde atrás, las patas son rectas, paralelas entre sí, y lo suficientemente amplio aparte de encajar con un cuerpo adecuadamente construido. Los espolones, si los hay, generalmente se extirpan. Pies de gato-como en las patas delanteras, sin girarse hacia adentro ni hacia fuera. «
Una vez más, el nivel y los gráficos estándar ilustrados hacen un excelente trabajo de describir la estructura deseada de la parte trasera cuando se ve desde atrás.
Las tras desviaciones típicas se muestran en la Figura 14 de abajo y tienen el mismo problema común que hemos visto en las desviaciones del frente. Estas piernas no son rectas como se requiere incluso cuando está parado en la posición normal (la izquierda está empeñado vaca y el derecho empeñado estar abierto).
Figura 13
Figura 14
Cuando el perro mueve las fuerzas del movimiento hará que las articulaciones para flexionar lateralmente, absorbiendo energía y causando una tensión indebida en las articulaciones. Esto se desgastan las articulaciones y los neumáticos del perro.
Resumen
En un principio, este artículo se explica el modo de andar y el lado correcto correcto de ida y vuelta para el movimiento Pinscher Doberman. La intención era inculcar una visión del movimiento correcto del Doberman en la mente del lector.
Más adelante, el artículo describe la mecánica de la marcha y discutieron cómo ciertos rasgos estructurales que lo afectan. Fallas estructurales fueron utilizados para describir el movimiento incorrecto. Con fallos ayuda a entender cómo el perro no debe moverse.
Aunque es importante entender las fallas y cómo afectan a la marcha, el lector debe tener cuidado de no caer en la «culpa a juzgar» como el principal medio para evaluar el movimiento.Buenos jueces primero reconocer méritos, y luego evaluar el movimiento del perro basado en el equilibrio de las virtudes contra fallos.
Para enfatizar la importancia de positivo a juzgar, a continuación encontrará una repetición de las ilustraciones del movimiento correcto junto con una repetición de una descripción de la marcha correcta como se describe en la norma. Esperemos que el lector se centrará en ellos como el elemento más importante de este trabajo.
Del patrón Doberman Pinscher
Aprobado 06 de febrero 1982
Reformateado 06 de noviembre 1990
«Equilibrado gratuito, y vigoroso, con buen alcance en los miembros anteriores y buena conducción en los cuartos traseros. Al trote, hay una fuerte acción trasero de accionamiento. Cada pata trasera se mueve en línea con la pata delantera en el mismo lado. Patas traseras y frontales son arrojados afuera ni hacia adentro. La espalda permanece fuerte y firme. Cuando se mueve en un trote rápido, un perro bien construido voluntad de una sola pista «.
Acerca del Autor
Bob Vandiver es ex Presidente General de Educación del juez, Educación obtentor y Educación del expositor para DPCA. Ha estado involucrado con Dobermans desde 1969. Él y su esposa, Nancy, han hecho con éxito limitado, pero la cría bajo el prefijo Mistel. Bob fue aprobado para juzgar Dobermans en 1995 y ha sido aprobado para juzgar a todas las razas de trabajo y la mayoría de las razas deportivas.